いつも教室の運営にご協力頂きありがとうございます
2月のロボット教室の様子をおとどけします
コースの紹介
ベーシックコース
なわとびロボット「ジャンピングトビー」

ゴムの復元力とカウンターウェイト(バランスをとるおもり)を用いた工夫により、上手になわとびをするロボットです。 前半ではギアの回転とゴムの復 元力を利用してジャンプするロボットを製作します。後半はジャンプのタイミングにあわせてなわを回し連続でなわとびができるように改造します。
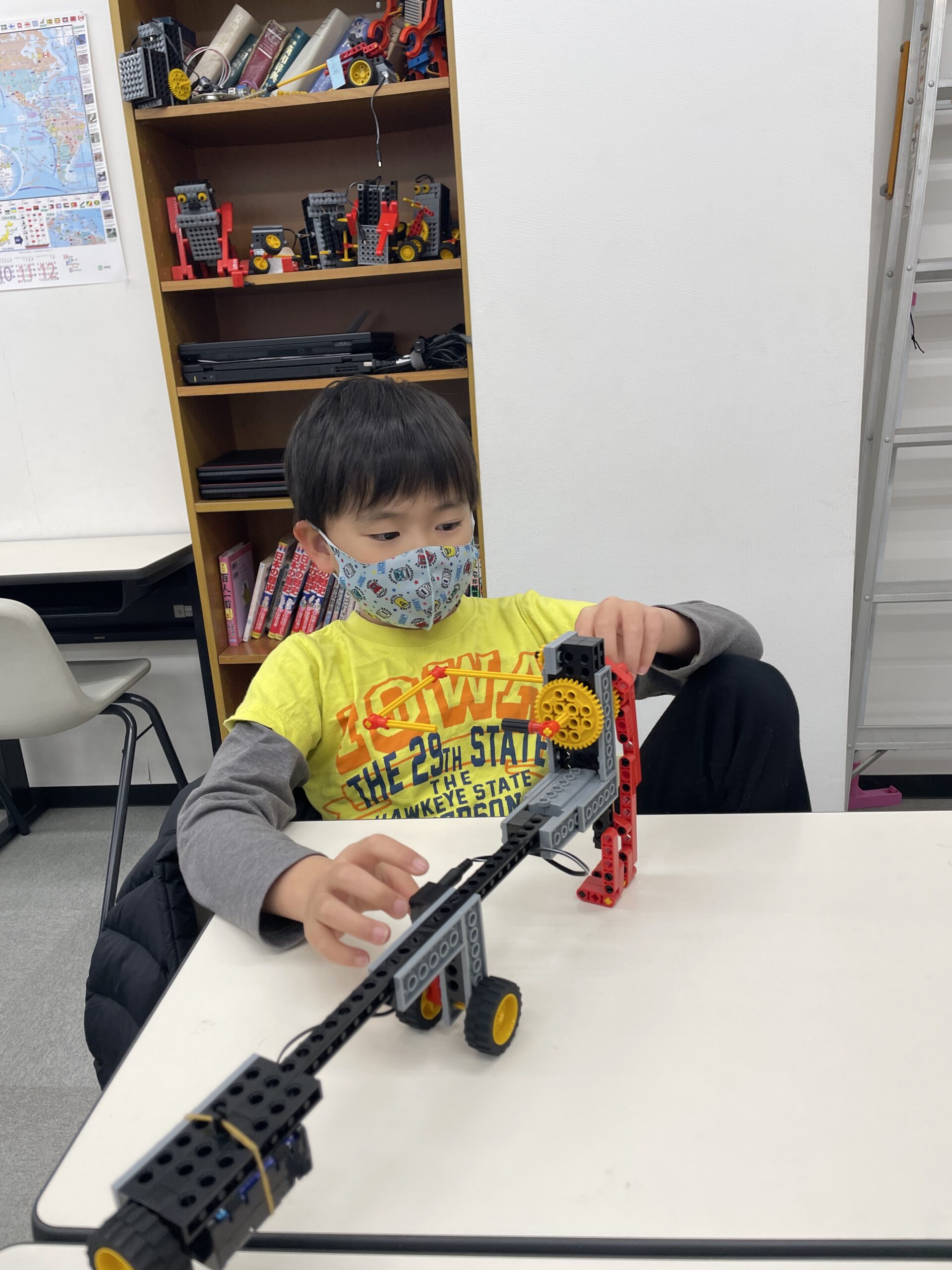
ミドルコース
馬車ロボット「バシャリン」

荷台に取り付けられたモーターの回転を、シャフトやギアを組み合わせて様々な部分に伝え、前進しながら馬の足、首、そして御者が動く、馬車型のロボットです。ロボットの動力がモーターからどのように伝わっていくのか観察し、その仕組みを理解します。
アドバンスコース
読書支援ロボット「メクリン」

2種類のページめくりロボットを製作します。人は本やノートなどのページをめくる時にどんな動作をしているかをよく観察し、ロボットがうまくページをめくれるようにチューニングをしていきます。また、2種類のロボットの動き方や、その利点と欠点を比較します。
ロボプロ
1年目 不思議アイテム1-2②

「不思議アイテムI-2」では、センサーというものをたくさん使って学んでいきます。 「センサー」 は、ロボットの要素である 「感じて」、 「考えて」、 「動く」、 の 「感じて」 の部分を担当してい ます。
人間でいえば、目、耳、鼻、 舌、皮膚、 の五感にあたります。 五感を同時に使い分けたりす ることに関しては人間の方がうまいのですが、 一つの機能の精度だけに限ると圧倒的にセン サーの方が上です。
今回は、人間でいえば目にあたる超音波距離センサーを使ってみましょう。 物差しなんてなく ても、ぴったりと距離をはかることができます! そんなセンサーを利用して、 「泥棒アラーム」や、距離を音に変える「テルミン」という不思議な楽器を作ってみます。 さらに、「超音波」とはそもそも何なのか、ということについても説明していきます。
2年目 倒立振子ロボット②

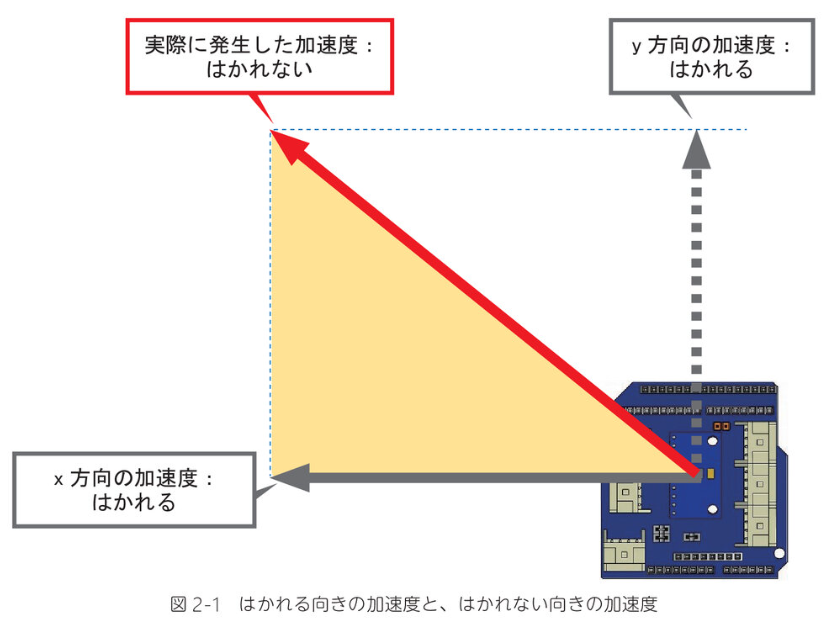
加速度を理解して、一輪車のようなバランスをとって自立するロボットを作成します。
今回も「センサーの値を、他のパーツの命令に使う」のは一緒ですが、 実際にプログラム をつくっていく中で「センサーの値をそのままでは使えない」という状況に直面します。「こんなとき、どんな処理をつけたせばいいのか? どういった計算を取り入れればよいのか?」をじっくり学び、 自分で考えるという経験を積んでみましょう。
3年目 2足歩行ロボット
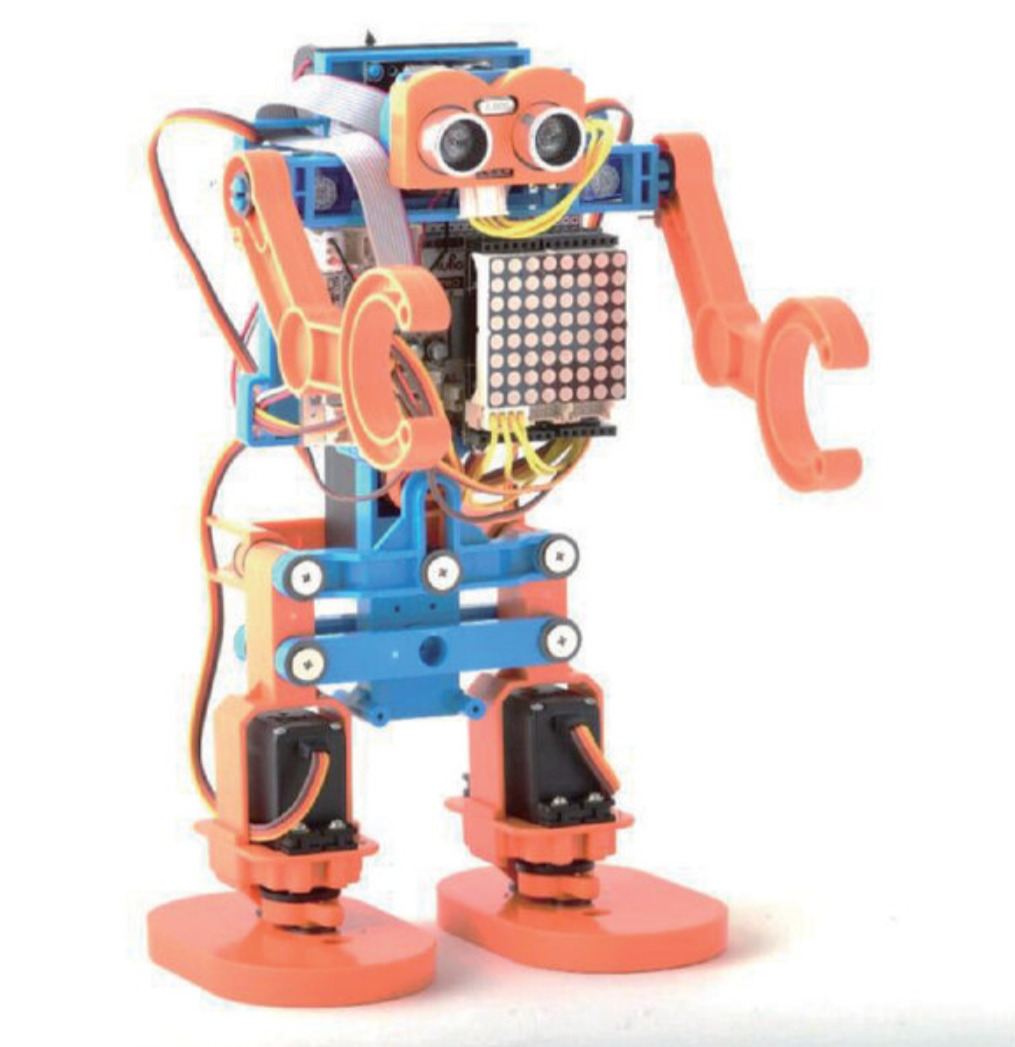
今回の授業では、 二足歩行ロボットを完成させて、さまざまな機能をロボットに加えていきます。
今回はマトリクスLEDとスピーカーの制御方法をおさらいして、ロボットの機能を増やしていきます。
マトリクスLEDとスピーカーは、1年目の授業から学んでいることの復習ですが、プログ ラムをしっかり理解して自在に動かせられるようになりましょう。
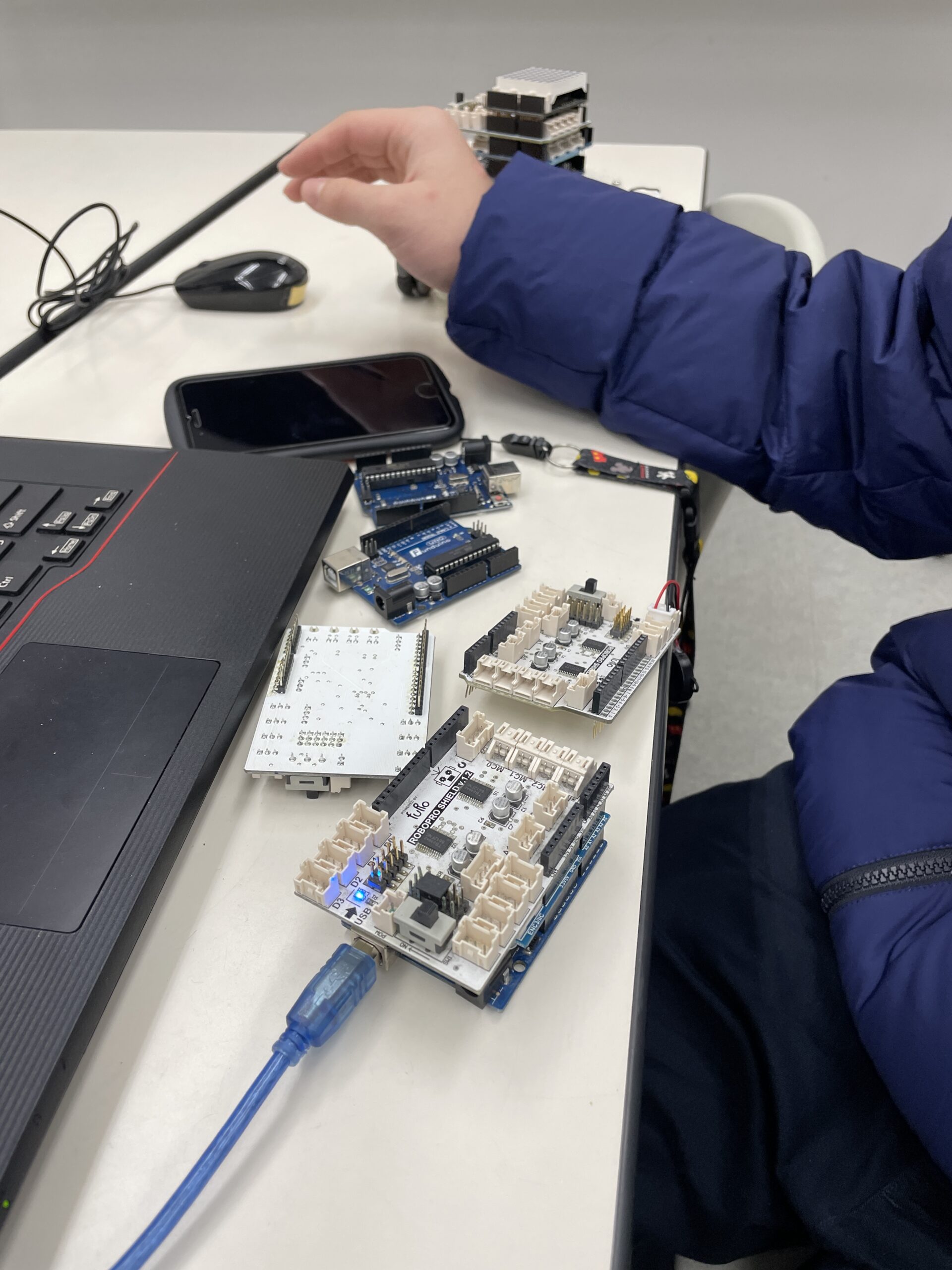
教室の様子
制作中
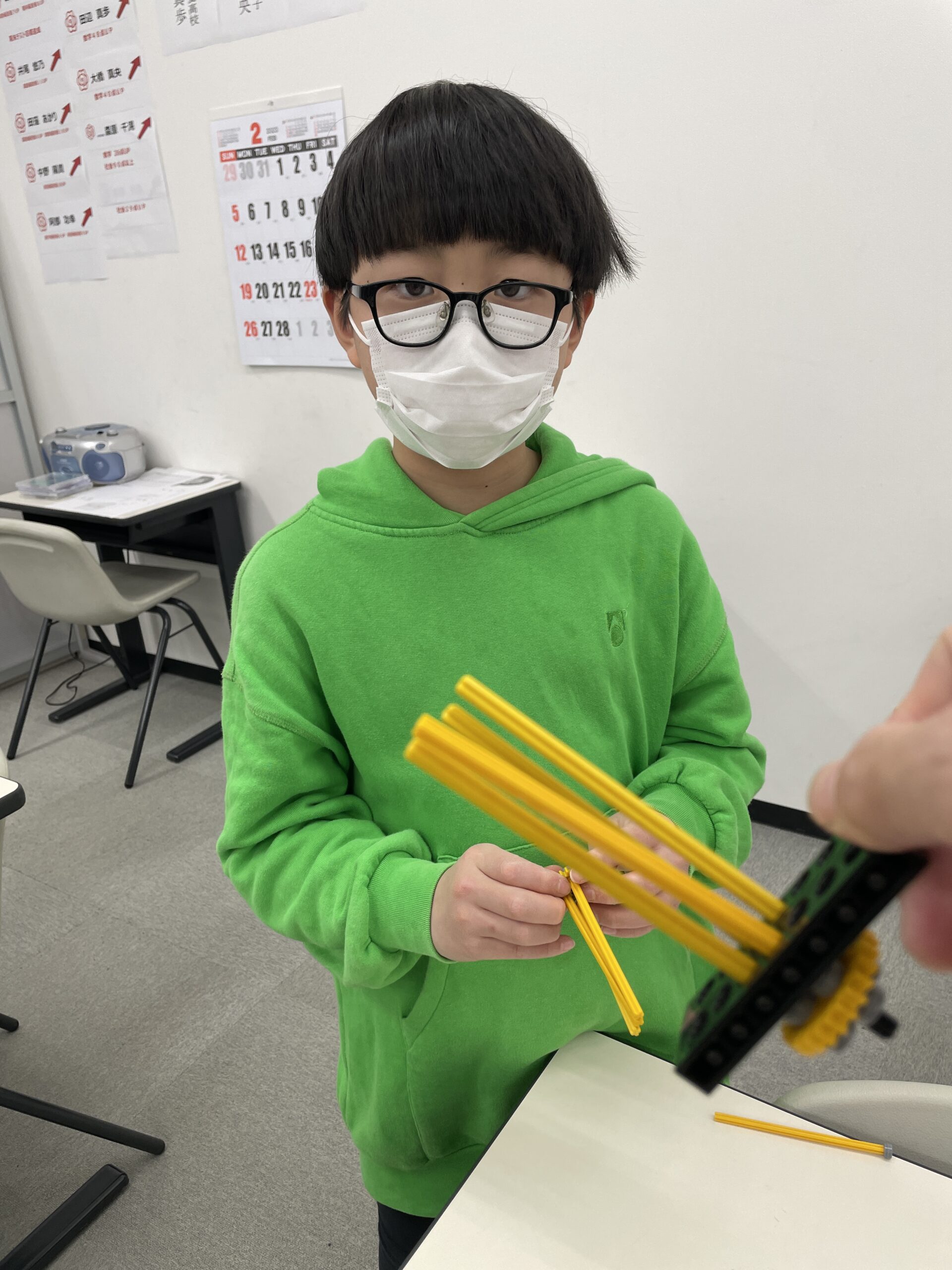

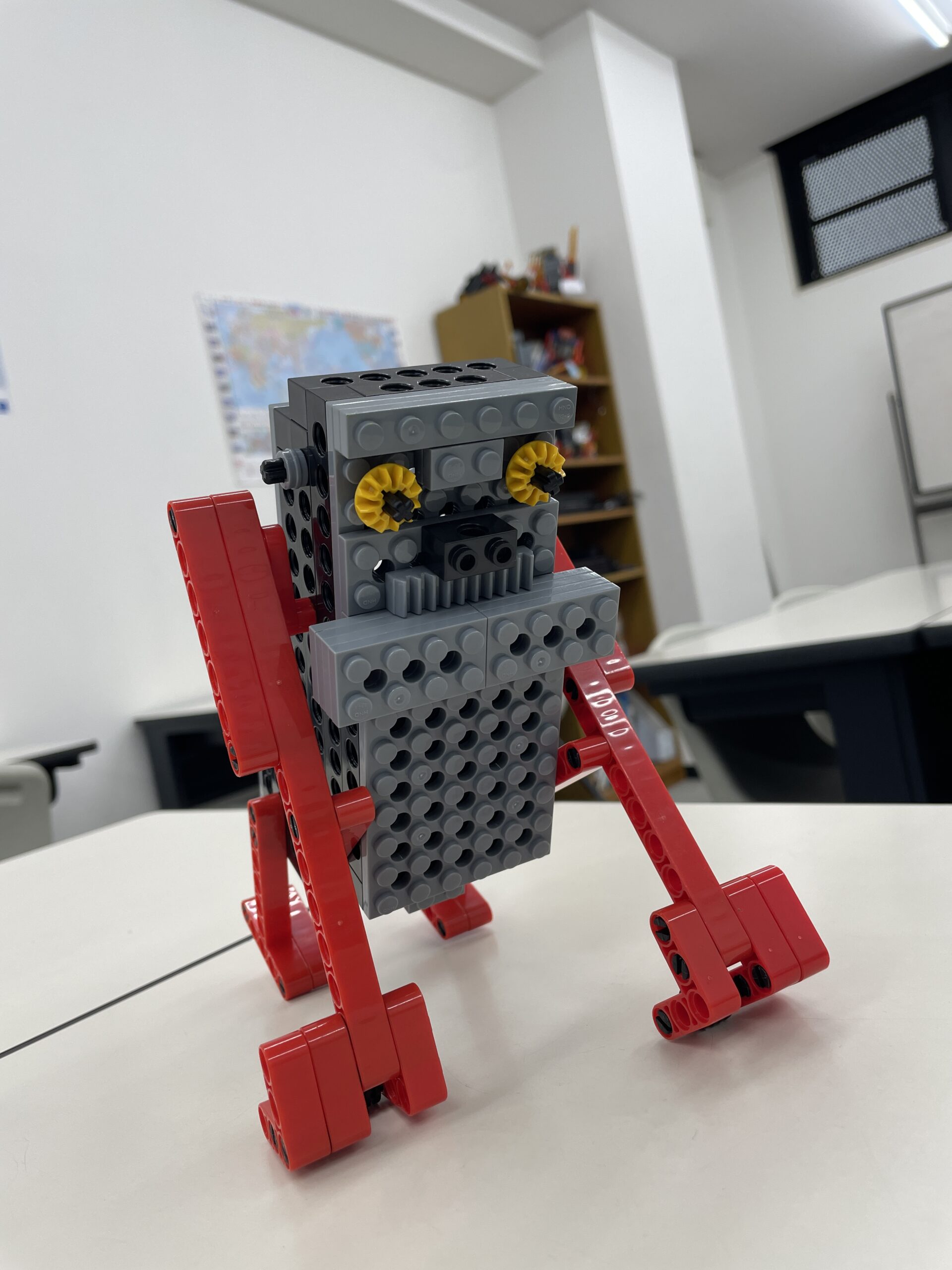





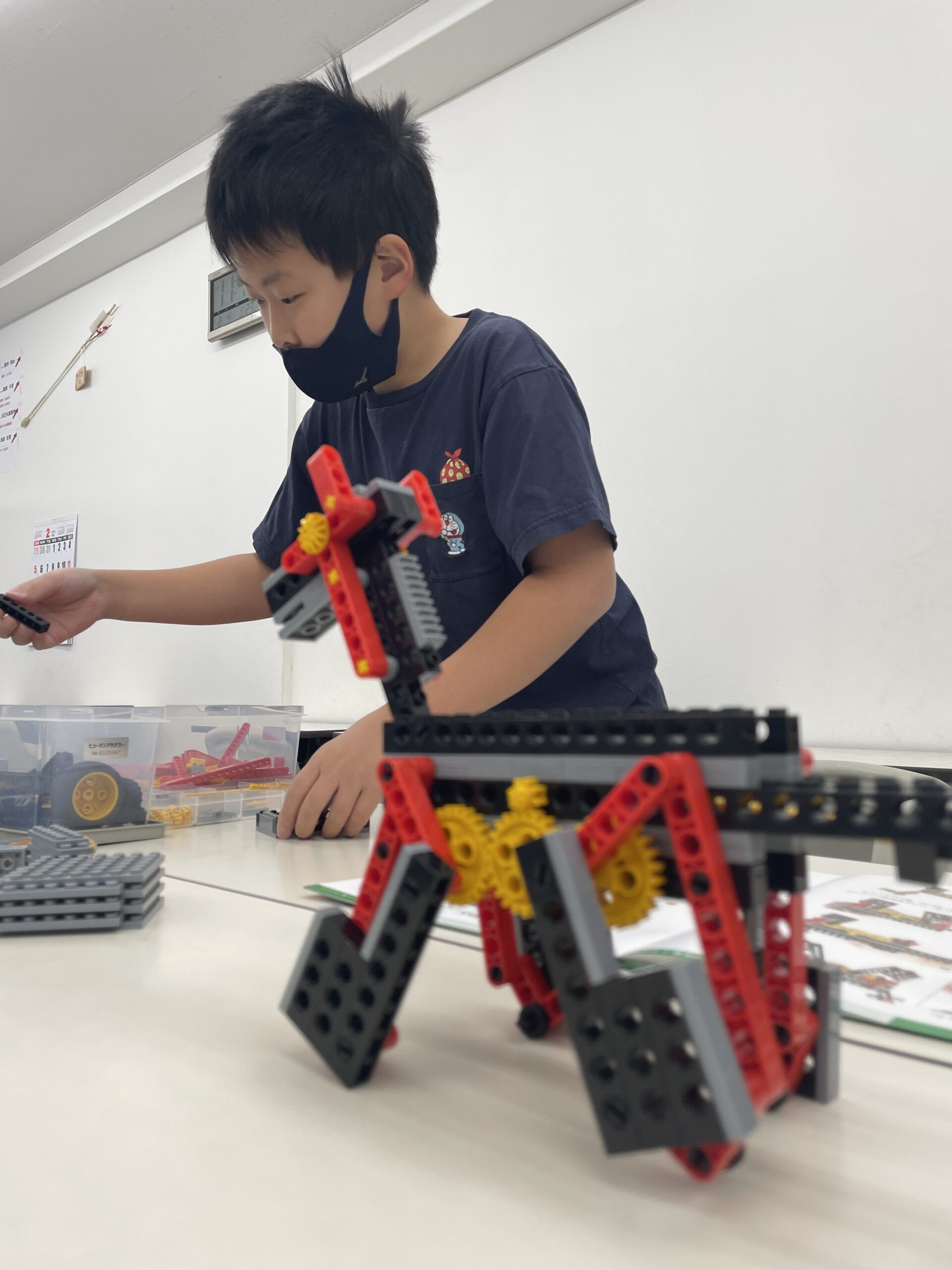














今月のロボットが動いているところ
オンラインサービスのお知らせ
ご登録いただくと、ロボットの作り方をオンライン動画でご覧いただけます

新タブレットのご紹介
既にタブレットをお持ちの生徒さんへのご紹介です
旧タブレットにはなかった「通信機能付き」のタブレットを期間限定の割引価格で販売します
期間:3/31まで
販売価格: 11,000円(税込み)

授業で使えるandroidタブレットということになりますね
ご購入をご希望の方は、ご連絡ください
それでは、また次回